이 포스팅은 쿠팡 파트너스 활동의 일환으로, 이에 따른 일정액의 수수료를 제공받습니다.
이 글은 LeRobot 스터디에 참여하면서 한 주 동안 진행한 내용이다. (LeRobot 레포의 README 중 일부 내용)
처음엔 이게 Gazebo 같은 시뮬레이터로 SO-101 로봇팔을 시뮬레이팅 하는 것이라 생각하고 진행했는데, SO-101도 아니었고 시뮬레이터도 아니었다. ALOHA 로봇팔에 대한 데이터셋을 시각화?하는 방법에 좀 더 가까운 것 같다.
“시뮬레이션”이란 가상의 환경을 실시간으로 계산 / 갱신하며 새로운 상호작용을 만들어내는 과정이고, visualize_dataset은 그런 과정 없이 기록된 데이터를 재생하는 ‘리플레이 / 플레이어’이기 때문에 이건 시뮬레이션이 아니라고 한다.
아무튼, 정리한 배경지식 & 용어와 ALOHA 데이터셋 시각화 방법은 다음과 같다.
배경 지식 및 용어
LeRobot
Hugging Face가 개발한 오픈소스 로봇 AI 플랫폼으로, 로봇 제어를 위한 데이터셋 / 모델 / 시뮬레이션 환경을 통합 제공한다.
- 특징
- 모방학습, 강화학습 모두 지원하며, 시뮬레이션과 실제 로봇을 모두 대상으로 학습/평가 가능
- 이미지 / 로봇 상태(state) / 행동(action)을 결합한 end-to-end 정책 학습을 구현할 수 있다.
- Hugging Face Hub와 연동되어 모델, 데이터 공유가 쉽다.
- 제약
- 실제 하드웨어에 적용할 때는 센서 잡음, 마찰 등 sim2real 간극과 비용 문제 등 현실적 제약이 존재한다.
ALOHA (A Low-cost Open-source HArdware)
저비용 / 개방형 설계를 기반으로 한 양손(bimanual) 로봇 조작 연구용 시스템
- 목적: 복잡한 조작(manipulation) 과제를 저비용 하드웨어와 동일 API로 실험, 학습할 수 있도록 설계
- 구성
- 보통 6자유도(6-DOF) ViperX 팔 2개(follower)와 더 작은 leader 팔을 결합해 원격조작(teleoperation) 데이터 수집이 가능
- 연구 세팅에 따라 부품/자유도 구성이 다를 수 있음
- 특징
- 시뮬레이터와 실제 로봇을 동일한 인터페이스로 다룰 수 있어 sim2real 이전을 쉽게 시도할 수 있다.
- 전체 시스템 비용은 약 2만 달러 수준(약 2700 ~ 2800 만원)으로, 산업용 로봇 대비 저렴하지만 연구 장비치고는 여전히 고가
PushT (Push Task)
탁자 위 물체를 목표 지점까지 미는(push) 조작을 수행하는 간단한 벤치마크 환경.
- 목적: 시각 기반 강화학습/모방학습 알고리즘을 반복 가능하고 비교 가능한 실험으로 평가하기 위함
- 특징
- 2D 평면에서 물체를 목표로 이동시키며, 경로 계획/접촉 물리(contact physics) 등 기본 제어 능력을 검증하기 적합
- 이미지/상태 정보 모두를 관찰값으로 활용 가능하고, 빠른 학습/알고리즘 비교가 용이하다.
Rerun.io
- 목적: 센서·이미지·3D 데이터를 실시간 스트리밍하고 시각화하여 디버깅 / 분석을 할 수 있게 하는 툴
- 특징: TensorBoard와 유사하지만 3D·로봇/센서 데이터 실시간 시각화에 강점이며, Gazebo·Unity 같은 시뮬레이터가 아닌 시뮬레이션, 실로봇에서 생성된 데이터를 시각화하는 용도로 사용된다.
- 공식 사이트: https://rerun.io
기타 용어
-
End-to-end 정책 학습: 이미지 등 원시 센서 입력을 받아 곧바로 행동을 출력하는 하나의 신경망을 학습하는 방식이다. 모듈별 오류 누적이 없고 전체 최적화가 가능하다는 장점이 있지만, 해석이 어렵고 대량의 데이터 및 안전성을 확보해야 한다는 단점이 있다.
-
sim2real: 시뮬레이터에서 학습, 개발한 로봇 제어 정책이나 모델을 실제 환경에 적용하는 기술을 말함
-
miniconda: Conda는 파이썬을 포함한 다양한 언어의 패키지 관리와 가상환경 관리를 함께 제공하는 오픈 소스 도구이고, Miniconda는 파이썬 패키지 관리와 가상환경을 제공하는 conda의 핵심 기능만 담은 경량 배포판
실행해보기
실행 환경
- Apple Silicon (Macbook Pro M4)
실행 방법
(1) miniconda 설치
(2) conda 명령어로 가상환경 생성 및 활성화
conda create -y -n lerobot python=3.10
conda activate lerobot

(3) [첫 설치일 경우] conda 약관 확인 명렁어 입력
conda tos accept --override-channels --channel https://repo.anaconda.com/pkgs/main
conda tos accept --override-channels --channel https://repo.anaconda.com/pkgs/r
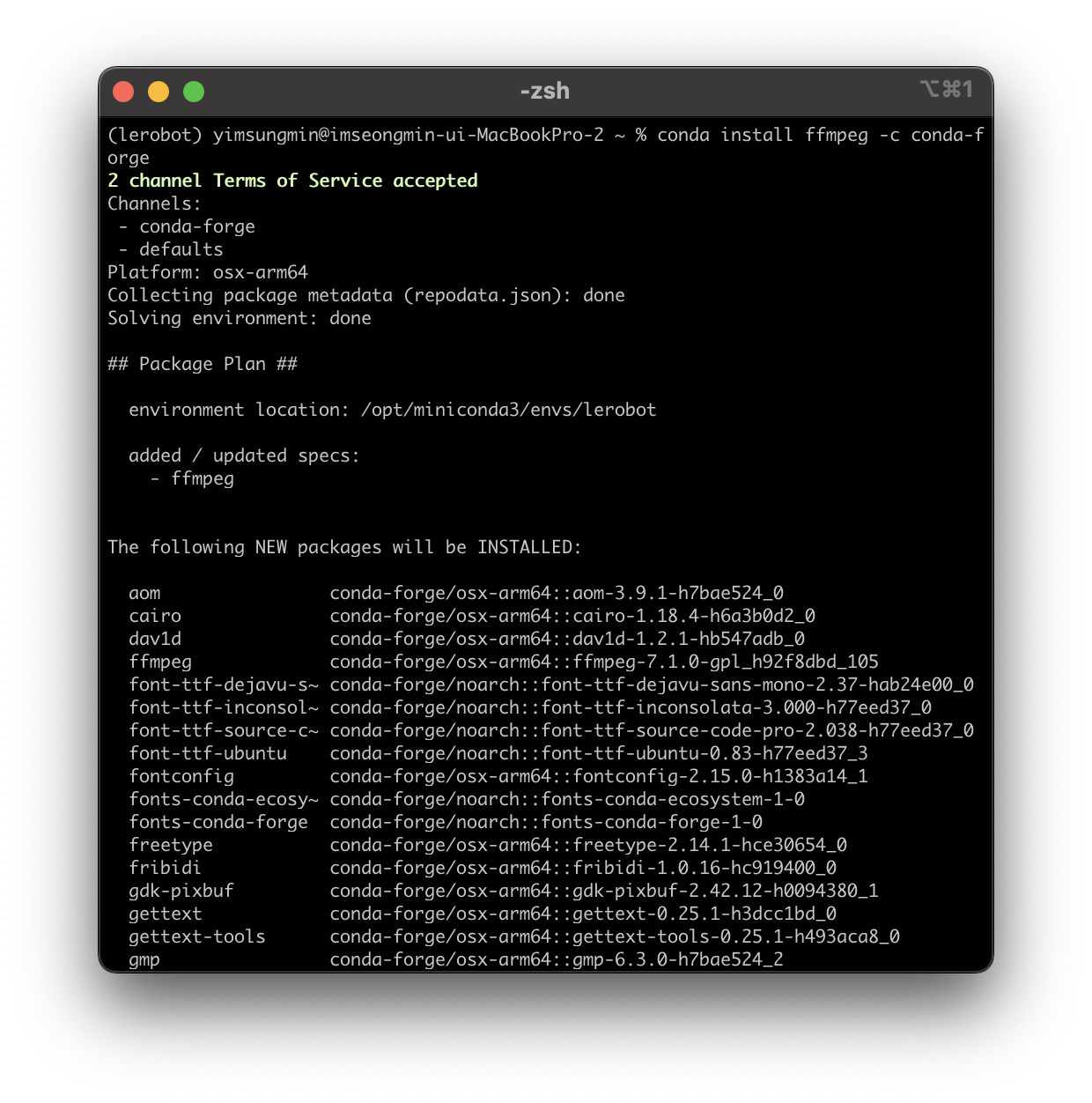
(4) 현재 활성화된 conda 환경에 conda-forge 채널을 사용해 FFmpeg를 설치
conda install ffmpeg -c conda-forge
- FFmpeg는 오디오·비디오를 인코딩, 디코딩, 변환, 녹화, 스트리밍할 수 있는 오픈 소스 멀티미디어 프레임워크
- LeRobot는 로봇 관련 AI (시뮬레이션, imitation learning, 행동 학습) 데이터를 다루기 때문에 이 패키지가 필요하다. 데이터셋에 비디오 파일이 포함되고, 이 데이터를 프레임 단위로 처리하기 위한 목적.
(5) 프로젝트 클론 및 해당 프로젝트 경로로 이동
git clone https://github.com/huggingface/lerobot.git
cd lerobot

(6) 파이썬 패키지 설치
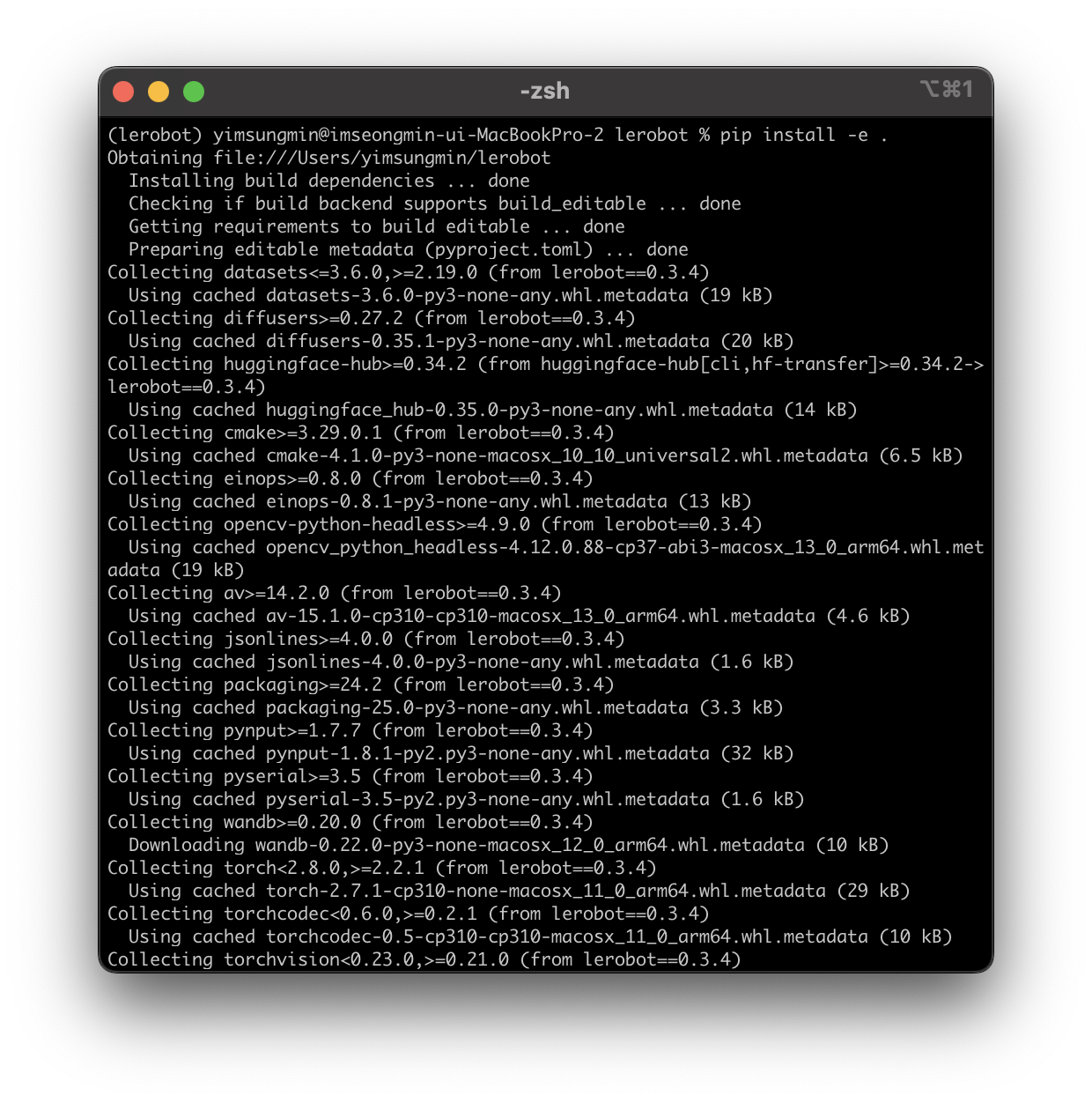
pip install -e .
pip install 'lerobot[all]'
- pip install -e .
- pip install -e . : 현재 디렉토리(.)의 파이썬 패키지를 editable mode로 설치
- e(editable) : 설치 후에도 소스 코드를 바로 수정하면 곧바로 반영
- pip install ‘lerobotall’
- PyPI에 올라간 lerobot 패키지를 일반(배포) 버전으로 설치
-
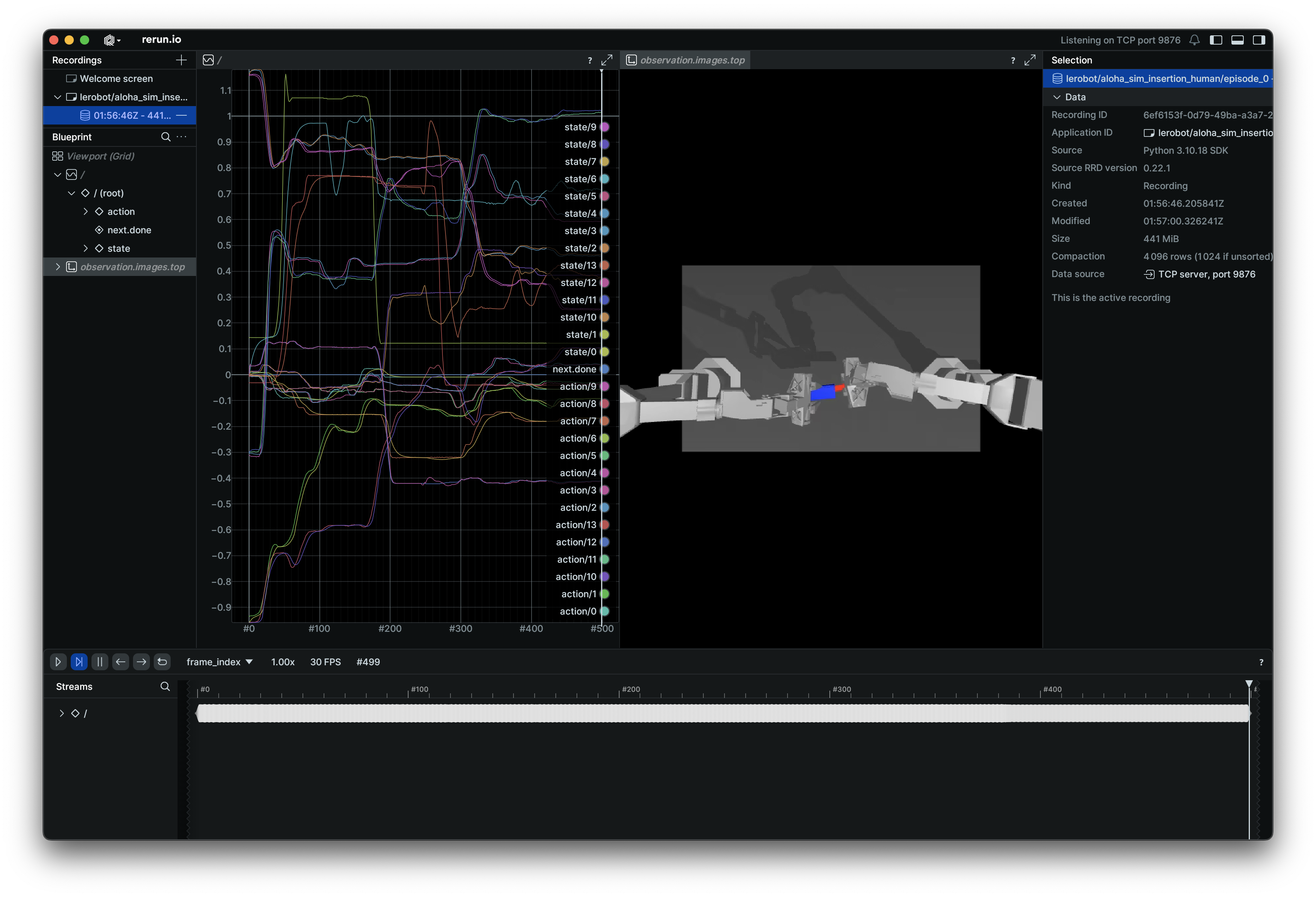
(7) Rerun 실행
python -m lerobot.scripts.visualize_dataset \
--repo-id lerobot/aloha_sim_insertion_human \
--episode-index 0
- rerun.io로 aloha 시각화를 실행하는 명령어
- 즉, Hugging Face에 올라간 로봇 시뮬레이션 데이터셋의 0번 에피소드를, LeRobot이 제공하는 시각화 스크립트로 파이썬 모듈 실행 방식으로 재생하라는 의미
- 이 명령어를 실행하면 Rerun이 실행되고 하단의 재생 버튼을 누르면 로봇팔이 데이터셋에 맞게 움직인다.
참고
- HuggingFace LeRobot: https://github.com/huggingface/lerobot
- Mobile ALOHA: https://mobile-aloha.github.io/
- aloha_sim_insertion_human: https://huggingface.co/lerobot/act_aloha_sim_insertion_human
- rerun.io: https://rerun.io